🐤
【Robin】スマホで動くROS2用のデバッグコントローラーを作ってみた
Toshihiro Tange
2026/04/17
Robinとは
スマホで動くROS2用のデバッグコントローラーです。 ROS2 Humble上でrosbridge-serverおよびRobinのサーバーを起動すれば https://robin.pylot-robotics.org からアクセスすることができます。(詳しい起動手順はGitHubリポジトリに掲載しています)
動作映像
動画はこちら。 Twitter/X:
機能一覧
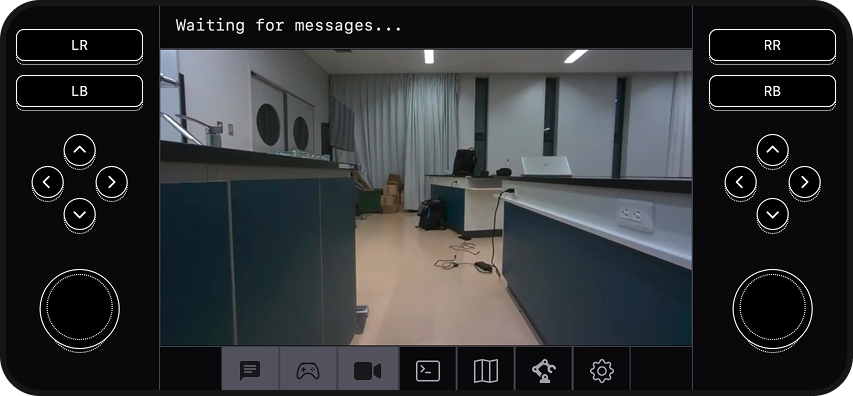
Joy stick publish and Image Subscribe
ros2のjoy topicと同じ出力をすることができます。
さらに、同一ネットワーク内に存在するトピックを選択してImage topicを受信することができます。 webRTCを使用しており、低遅延で画像を受信することができています。
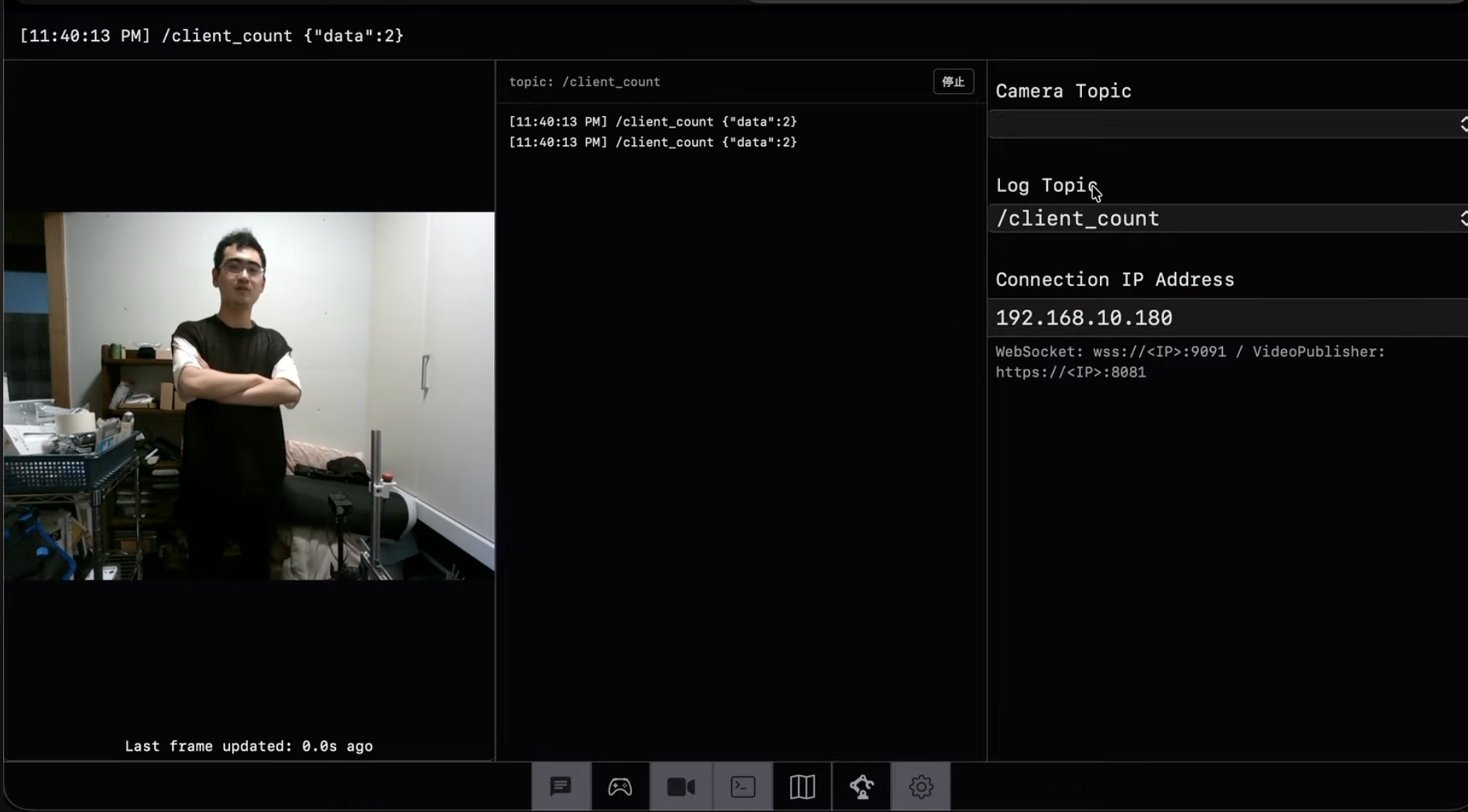
Topic Subscribe
ros2の任意のトピックを受信することができます。
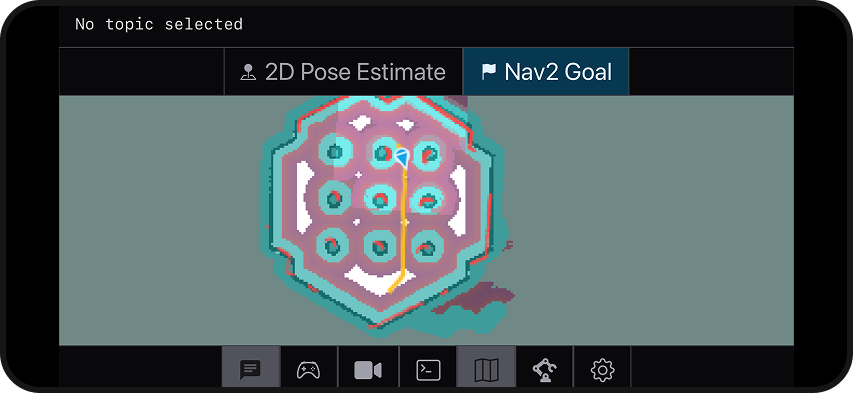
Nav2 debug
Nav2に関連する、 ・map ・scan ・local costmap ・global costmap ・pose を描画することができます。
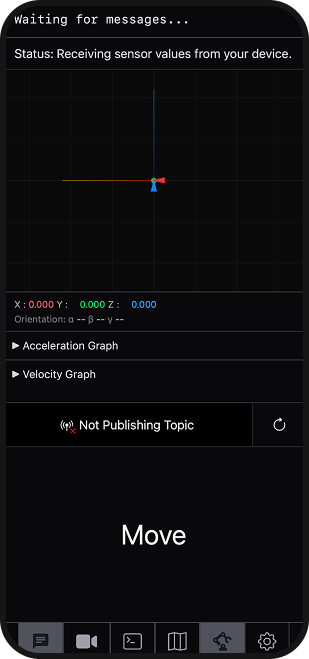
iPhone IMU Publish
iPhoneに搭載されているIMUの値をpublishすることができます。 ManipulatorのTrajectryに入力すれば、スマホからロボットアームをテレオペレーションすることができます。
データ収集
Lerobot用のデータセットを取集することができ、IMUで動かしたロボットアームや、joyで動かした台車の軌跡などを保存することができ、VLAや模倣学習の学習データとして利用することができる。 モデル作成でなくとも、事前学習用の少量のデータ収集のためのツールとして使うことができ、ROS2環境を維持したままRobot learningを導入することができるようになると考えている。
複数機能同時使用
ページ下部のボタンを複数選択することで、複数の機能を同時に使用することができます。 (ex. Nav2のデバッグ画面でGoal Poseを出力しながら、Imageを表示し、ロボットの視界を見ながらデバッグをする)